Introduction to Plastic Analysis:
Analysis of stress, deflection and distortion determinations within the limit of proportionality of the material of a structure have been satisfactorily made. Designs are also made assuming that the structural members behave elastically. We have been providing a factor of safety based on yield stress. But strictly providing a factor of safety on the basis of yield stress is not a consistent indication of the factor of safety with respect to the ultimate capacity of a member. In other words, if yield point is attained at a single point, it does not mean a state of collapse of the member. Due to plastic deformations and strain hardening of the material particles which were less stressed will be brought into action, so that the structure actually is able to resist greater loads. In modern designs the above principle is followed and the method of design on this principle is called collapse method of design or plastic design. Structural steel has an important property viz. its ability to resist large deformation without fracture. A large part of this deformation occurs during yielding. A relatively large part of deformation occurs during the strain hardening process.
Plastic method adopts the ultimate strength as the criterion for design. The method therefore takes into account the behaviour of a member as it is stressed beyond the yield stress, in the inelastic or plastic range. Ultimate loads which cause the collapse are determined by multiplying the working loads by a load factor. In plastic designs importance is given to resistances to bending caused by loads when the members are in the plastic range.
Plastic designs consider the capacity of members to continue offering resistance even after reaching the yield stress. This has been possible due to the unique property of ductility possessed by steel. A steel member is capable of absorbing considerable deformation, beyond the limit of elasticity without fracture or collapse. The capacity of the member to have this reserve strength after reaching the yield stress has been recognized and taken into account in plastic designs.
Plastic Moment of Resistance of a Rectangular Section:
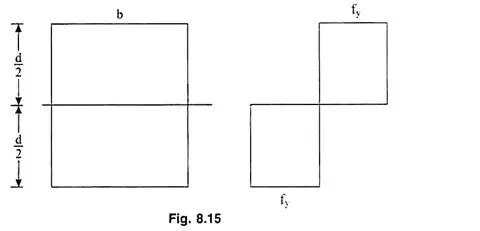
Consider a rectangular beam section which has developed a plastic hinge (Fig. 8.15).

Moment of Resistance of a Rectangular Beam Section for a Given Depth of Penetration:
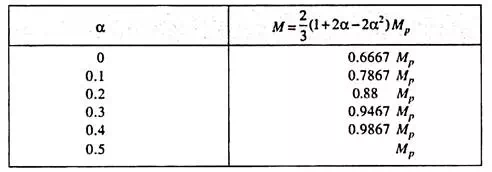
Fig. 8.16 shows a rectangular section of width b and depth d. Let the beam be subjected to a moment due to which the stress distribution is as shown in the figure with a depth of penetration efrom the extreme edges.
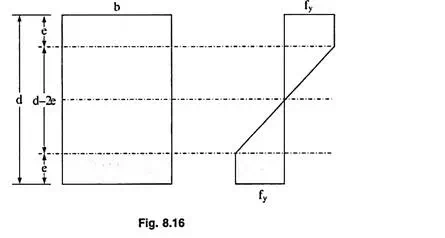
Moment of resistance of the section = M = Moment of resistance of the yielded zone + Moment of resistance of the elastic zone.
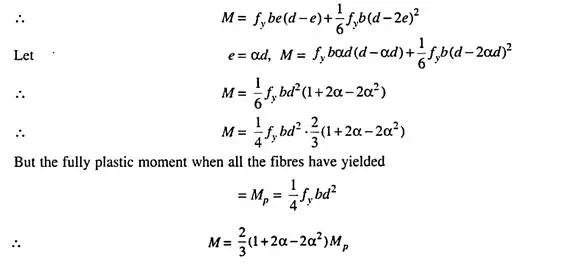
The moment of resistance for various values of a ranging from 0 to 0.5 are given in below table:
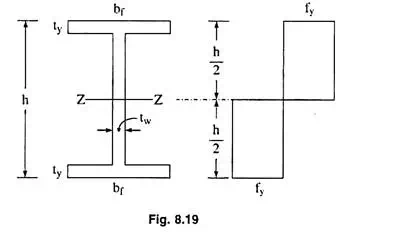
Plastic Moment of Resistance of a Symmetrical I-Section:
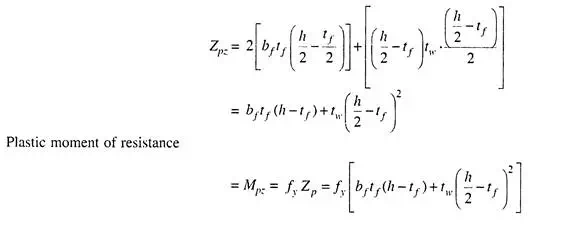
Consider a symmetrical I-section shown in Fig. 8.19 subjected to bending about the z-axis. When the beam section develops a plastic hinge the stress across the section is equal to ƒy.
Plastic modulus of the section = Sum of the moments of the compression and tension areas of the section about the plastic neutral axis-
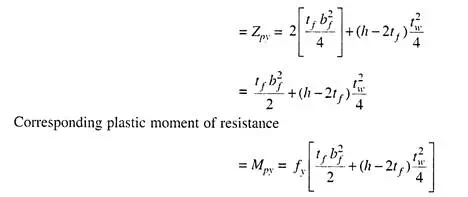
For the condition when the beam section bends about the y-axis corresponding plastic modulus-
Relation between Load Factor and Factor of Safety:
Load factor is the ratio of the collapse load to the working load (allowable load)
Let Wu = Collapse load and Wa = Working load
λ = Load Factor = Wu/Wa = Plastic moment/Allowable moment
Factor of safety is the ratio of yield stress to the allowable stress
Let ƒy = yield stress and ƒa = safe stress
F.S. = Factor of safety = ƒy/ƒa
Let Plastic moment of resistance = Mp = ƒy Zp, where Zp = Plastic modulus of the section.
Let allowable moment = Ma = ƒa Z, where Z = Section modulus of the section.
= [ƒy/F.S.]Z
Load Factor = Factor of Safety × Shape Factor.
Some Important Theorems in Plastic Theory:
In the analysis of structures by plastic theory, the following conditions must be satisfied:
(i) Equilibrium Condition:
Conditions of equilibrium shall be satisfied. Resultant of all forces on the structural member shall be equal to zero. Resultant of all moments shall be equal to zero. The bending moments shall be consistent with the loads applied to the structure.
(ii) Mechanical Conditions:
At the collapse state, sufficient number of plastic hinges must be developed so as to transform a part or the whole of the structure into a mechanism or mechanisms.
(iii) Yield Condition:
At collapse state, no where shall the bending moment exceed the plastic moment.
From the conditions given above we get two methods of analysis by plastic theory, which are based on the following theorems:
a. The Upper Bound Theorem:
A load determined by assuming a mechanism will always be greater than or equal to the actual collapse load.
This theorem may also be stated as – Of the various mechanisms obtained by assuming various positions of plastic hinges, the correct collapse mechanism is that for which the collapse load is the minimum.
b. The Lower Bound Theorem:
A load determined on the basis of any assumed collapse bending moment diagram in which the moment at any section is less than the plastic moment is less than or equal to the actual collapse load.
c. Uniqueness Theorem:
If it is possible to arrive at a system of beading moments for the structure to satisfy equilibrium condition, mechanism condition, and yield condition, the corresponding load system represents the true collapse load system.
Generally it is impossible to satisfy all the three conditions mentioned above.
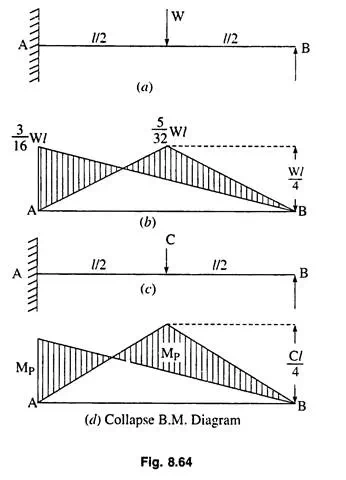
Propped Cantilever Carrying a Point Load at Mid Span:
Fig. 8.64 (a) shows a propped cantilever AB of span l fixed at A and propped at B carrying a point load W at the centre. At elastic Fig. 8.64. (b) shows the B.M. diagram under elastic condition. The maximum sagging moment = 5/32 Wl and the maximum hogging moment at the fixed end A = 3/16 Wl.
If now the magnitude of the load is increased we find the greater of the above bending moments, i.e., the hogging moment of the fixed end reaches the plastic moment Mp earlier resulting in the formation of a plastic hinge. But, due to the formation of the plastic hinge at A, there will not be any collapse of the structure, since with a hinge at A the structure still remains stable.
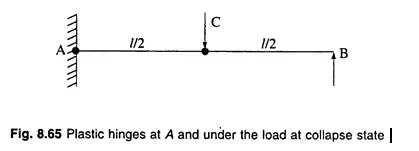
As the magnitude of the load is further increased, the structure will still remain stable until another plastic hinge will be formed at the section of maximum sagging moment, i.e., under the load. Hence at the collapse condition, the bending moment at A and at the mid-section will be equal to the plastic moment Mp. The B.M. diagram corresponding to this condition is shown in Fig. 8.64(d). The collapse load on the beam is C. Fig. 8.65 shows the member with plastic hinges at A and under the load.
Propped Cantilever Carrying a Point Load Eccentrically on the Span:
Consider a propped cantilever AB of span l, fixed at A and propped at B carrying a point load eccentrically on the span at a distance a from the end A and b from the end B. As in the previous case, a plastic instability will be reached when the bending moment at A and also under the load reach the plastic moment Mp. With plastic hinges at A and under the load a collapse state is reached. Let C be the collapse load.
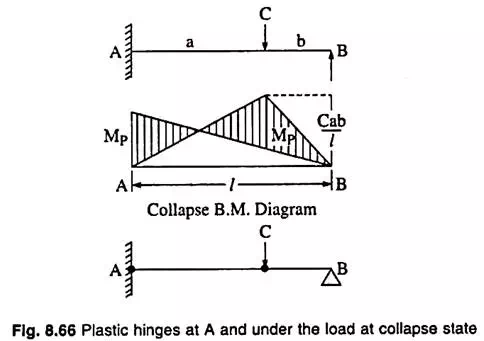
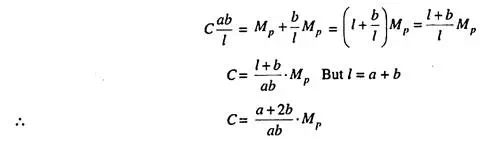
Fig. 8.66 shows the collapse B.M. diagram.
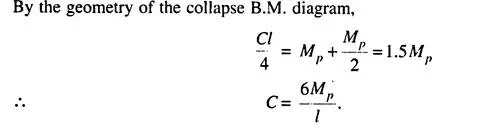
By the geometry of the collapse B.M. diagram.
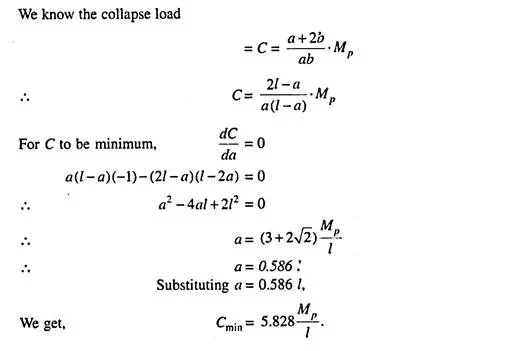
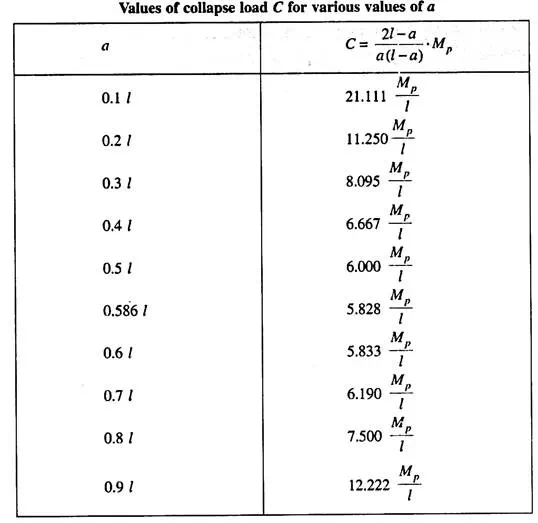
Load Position for Minimum Magnitude of Collapse Load:
Propped Cantilever Carrying a Uniformly Distributed Load over the Whole Span:
Consider a propped cantilever of span l fixed at the end A and propped at the end B. When the propped cantilever carries a uniformly distributed load of w per unit length, under elastic condition, the maximum sagging moment is (9/128) wl2 at a distance (3/8) l from the end B. Maximum fogging moment is wl2/8 which occurs at the fixed end A.
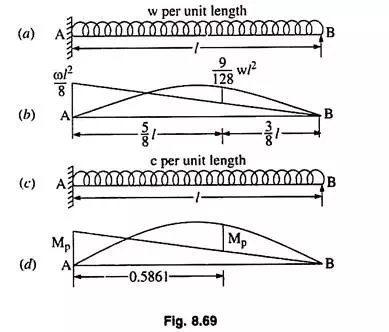
For the collapse condition the collapse distributed load of c per unit length will produce a plastic instability with two plastic hinges, one at the fixed end A and the other at a section between A and B.
Let the plastic hinge between A and B be at a distance x from the end A.
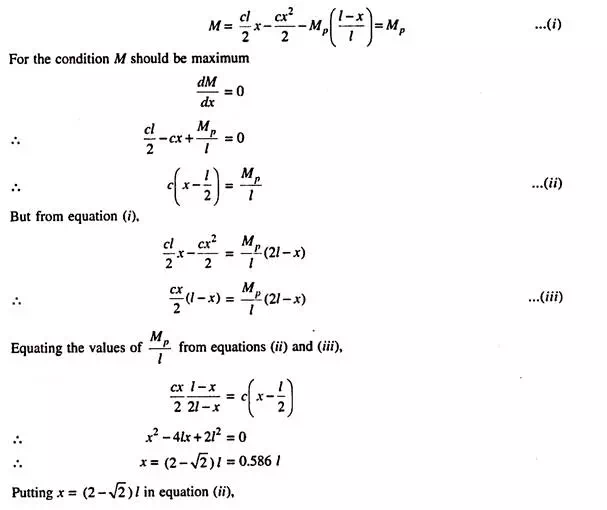
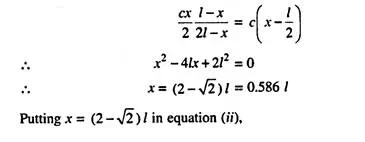
The condition to be satisfied is-
Hogging moment at A = Sagging moment at the section distant x from A = Mp (Fig. 8.69(d))
For the B.M. at a section distant x from A to reach Mp,
Alternative Approach:
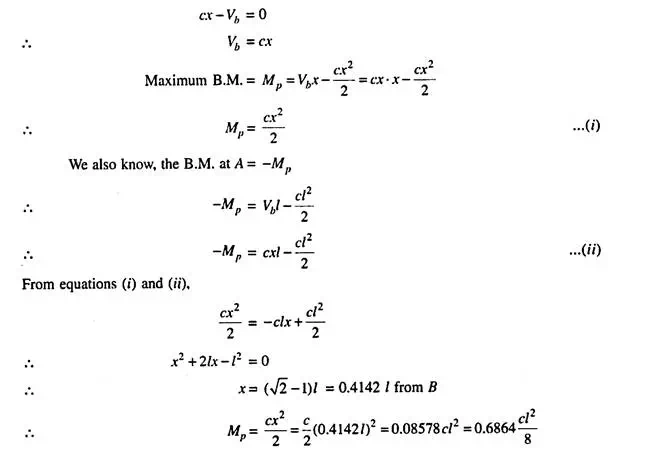
When the propped cantilever carries the collapse load, let the reaction at the propped end B be Vb. Let the shear force be zero at a distance x from B.
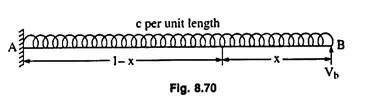
Equating the shear force to zero.
Another Alternative Approach (Segment Equilibrium Method):
At collapse condition a plastic hinge exists at the fixed end A and a plastic hinge exists at the section of maximum sagging moment.
Let this second plastic hinge be at D at a distance x from the propped end B. Now the beam consists of two parts AD and BD. At the section D there will be no shear force and the section D is subjected to the plastic moment Mp only.


Application of Principle of Virtual Work in Plastic Analysis:
The maximum bending moments which occur at the plastic hinges are numerically equal to the plastic moment Mp. It will be found convenient to analyse the members by the principle of virtual work. In the collapse condition a small (virtual) displacement is given to the frame or structure (which has developed a mechanism which therefore allows freely such displacement). We use the principle that the total work done during such a small displacement should be equal to zero as a condition for equilibrium. It should be noted that since the plastic moment Mp acts so as to oppose any rotation, the virtual work done by the plastic moment is negative.
The method will be clear from the following illustrations:
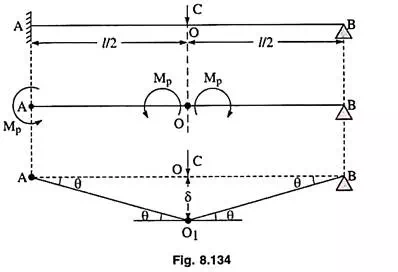
(a) Propped Cantilever Carrying a Point Load at the Centre:
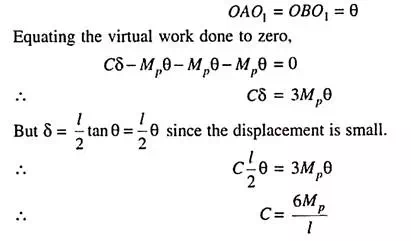
Fig. 8.134 shows a propped cantilever carrying the collapse load C at the centre of the span. In the collapse condition plastic hinges are formed at the fixed end A and under the load. Let us provide a small displacement OO1 = δ
Let the angular displacement-
(b) Propped Cantilever Carrying a Point Load Eccentrically on the Span:
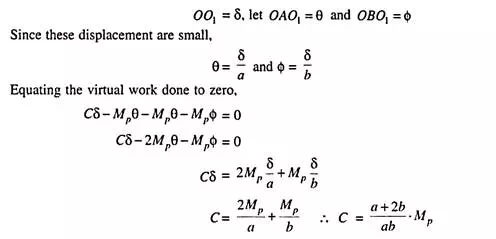
Fig. 8.135 shows a propped cantilever carrying the collapse load C eccentrically on the span at O so thatAO = a and BO = b. In the collapse condition plastic hinges are formed at A and O.
Let us provide a small displacement-
(c) Fixed Beam Carrying a Point Load at Mid Span:
Fig. 8.137 shows a fixed beam AB carrying the collapse point load C at the centre O. Corresponding to the collapse condition plastic hinges are developed at the ends A and B and under the load at O.
Let us provide a small displacement OO1 = δ
Portal Frames:
Fig. 8.174 shows a rectangular portal frame hinged at the base. Suppose the load system on the frame consists of a vertical load W at the mid point of the beam and a horizontal load H applied at the level of the beam. Let the frame reach a collapse state.
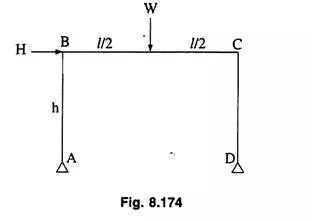
The following collapse conditions will be considered:
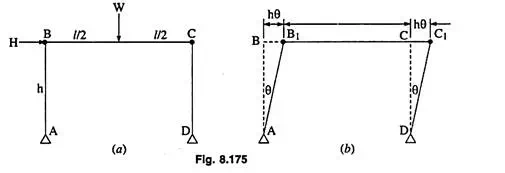
(i) Collapse of the frame due to plastic hinges developed at B and C [Fig. 8.175 (a) and (b)].
Provide a small displacement as shown.
Virtual work done= Hhθ – Mpθ – Mpθ = 0
Hh = 2 Mp
(ii) Collapse of the frame due to plastic hinges developed under the load W and at C [Fig. 176 (a) and (b)].
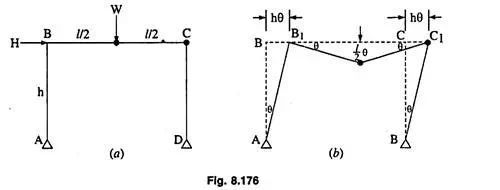
Provide a small displacement as shown.

The actual form of collapse can be decided by considering the above two possibilities of collapse and the smaller of the two sets of load systems will be considered as the actual collapse load system.

{kind=link}
{kind=link}
{kind=link}